Asservissement
Dans ce chapitre, nous allons nous intéresser aux systèmes régulés en boucle ouverte et boucle fermée, leur fonctions de transfert et les différents types de correcteurs.
1/ Système en boucle ouverte
Aucune correction n'est apporté au système.

Représentation

Fonction de transfert
La fonction de transfert d'un système en boucle ouverte est définie par le gain du système, c'est à dire la sortie sur l'entrée.
2/ Système en boucle ferméee
En boucle fermée, la sortie va être mesurée puis comparée à la consigne. Une correction va être apportée Pour que la sortie se rapproche le plus possible de la consigne.

Représentation

Fonction de transfert
La fonction de transfert d'un système en boucle fermée est définie ainsi :
3/ Caractéristiques d'un système asservi
Un système asservi est caractérisé par :
- La précision : c'est la capacité du systèe à se rapprocher le plus possible de la valeur de la consigne.

Pour déterminer la précision d'un système asservi, on calcule l'erreur statique, c'est à dire la différence entre la valeur de sortie et la consigne. L'erreur statique s'exprime en pourcentage de la consigne.
- La rapidité : C'est la capacité du système à atteindre le plus rapidement possible son régime stable.

Pour déterminer la rapidité du système asservi, on calcul le temps de réponse à 5%?
Pour cela, on trace deux droite, une à 5% en dessous de la consigne et une à 5% au-dessus de la consigne.
Le temps de réponse à 5% est le temps à partir duquel la coourbe du système asservi reste entre ces deux droites.
- La stabilité : C'est la capacité du système à être le plus stable possible, c'est à dire pour une consigne constante, à être constant.

- Le premier dépassement : C'est la capacité du système à rester dans des valeurs tolérables. Pour cela, on mesure l'oscilation la plus grande.

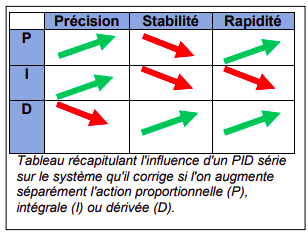
4/ Les correcteurs
Un correcteur est un algorithme de calcul qui délivre un signal de commande à partir de la différence entre la consigne et la mesure. Le correcteur PID agit de 3 manières :
- Action proportionnelle : amélioration de l'erreur statique
- Action intégrale : l'erreur est intégrée et divisée par un gain
- Action dérivée : l'erreur est dérivée et multipliée par un gain